The Bento Arm has been our go to research platform in the BLINC Lab since we designed and built the first prototype in early 2014. Since then we have made countless improvements and built two additional prototypes that have been used by researchers in our lab for developing improved prosthetic systems using machine learning and haptic feedback technology. The Bento Arm is ideally suited for this type of research since it is built from Dynamixel actuators that have built in sensors for position, velocity, and load. This year we will be building our 4th prototype that is slated to be used in the Glenrose Rehabilitation hospital for prosthetic training.
Now that the Bento Arm has been proven in the research setting we are excited to share the design with the rest of the world, so that more people can benefit from this technology. The hardware open source release went live in May 2016 and the first open source software (brachI/Oplexus) was released in April 2017.
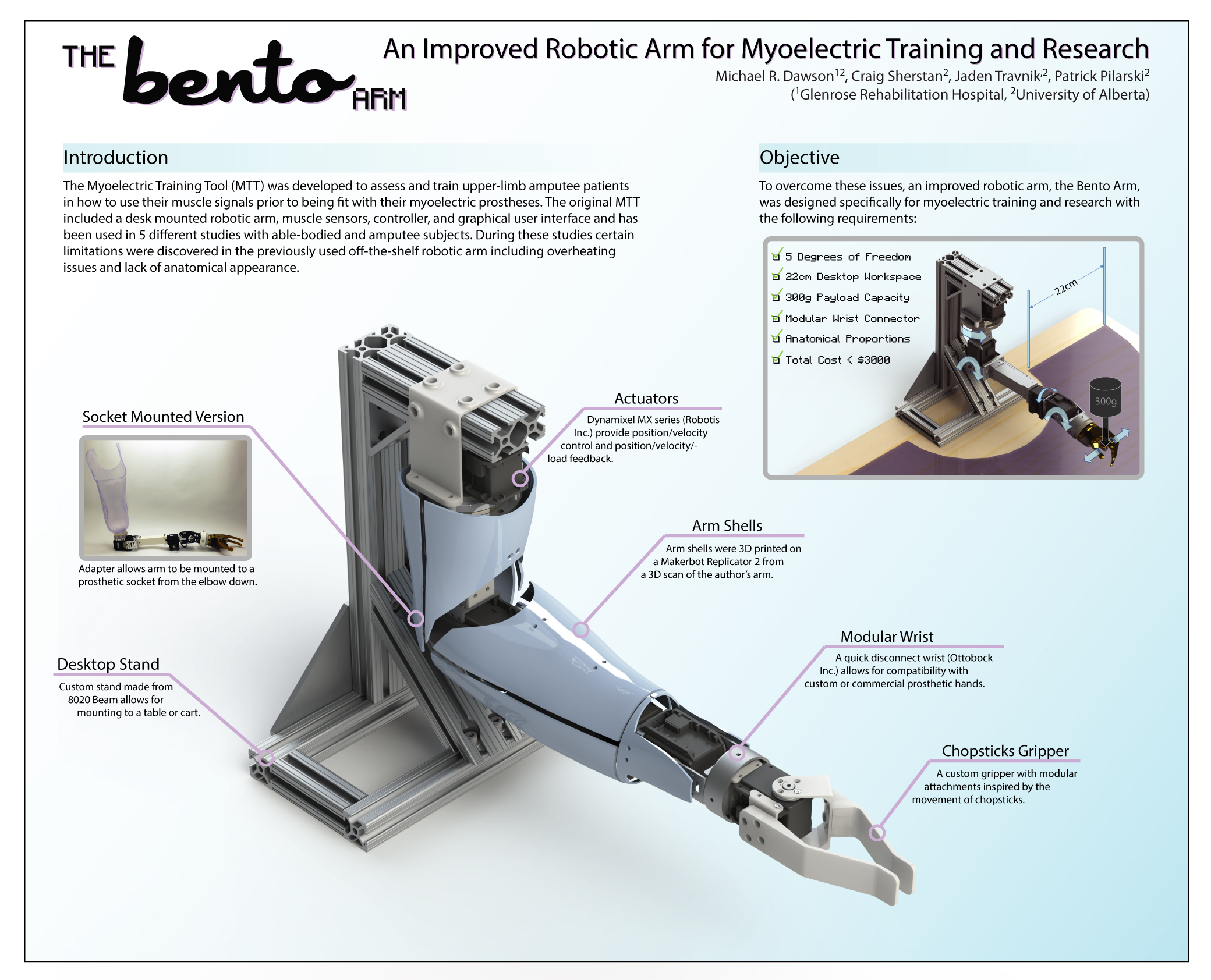
The Bento Arm is comprised of five MX series dynamixels, off-the-shelf dynamixel brackets and custom 3D printed links, brackets and arm shells. The 3D printed parts have been designed to print on the commonly available reprap 3D printers in the PLA material. The total print time for the Bento Arm is about 25 hours and the parts were designed support-free, so that very little clean up is required. For its initial open source release the Bento Arm will be paired with the Chopsticks gripper (featured below), but we will have a few more grippers and hand options available in the future.
![]()
The Bento Arm can also be controlled using any of the existing dynamixel software interfaces including the following:
- Official Dynamixel SDK – http://support.robotis.com/en/software/dynamixelsdk.htm
- Dynamixel_controllers ROS package – http://wiki.ros.org/dynamixel_controllers
- Python package – https://pypi.python.org/pypi/dynamixel/1.0.1
The goal with the brachI/Oplexus software was to provide a simple windows desktop application written in C# for users that want to control the arm out of the box without necessarily having to jump into coding right away. In addition to this software we also have two alternate custom softwares — one developed in the Robot Operating System (ROS) which is an open source framework for developing robotic systems and another developed in Matlab’s Simulink Realtime. Both softwares include mapping functionality to allow for control interfaces such as joysticks or muscle signals to be easily mapped to the joint movements on the arm.
For more information about the software and grippers that are compatible with the Bento Arm please see our BLINCdev development guide.
Development paper:
- M.R. Dawson, C. Sherstan, J.P. Carey, J.S. Hebert, P.M. Pilarski, “Development of the Bento Arm: An Improved Robotic Arm for Myoelectric Training and Research,” Proc. of MEC’14: Myoelectric Controls Symposium, Fredericton, New Brunswick, August 18-22, 2014, pp. 60-64. (PDF)
Related publications:
- D. J. A. Brenneis, M. R. Dawson, H. Tanikawa, J. S. Hebert, J. P. Carey, P M. Pilarski, “The Effect of an Automatically Levelling Wrist Control System,” 2019 IEEE-RAS-EMBS International Conference on Rehabilitation Robotics (ICORR), 24-28 June, 2019, Toronto, Canada, 8 pages. (Preprint PDF)
- J. Austin, A. W. Shehata, M. R. Dawson, J. P. Carey, J. S. Hebert, Improving Performance of Pattern Recognition-Based Myoelectric Control Using a Desktop Robotic Arm Training Tool,” 2018 IEEE Life Sciences Conference (LSC), Oct. 2018
- D. J. A. Brenneis, M. R. Dawson, G. Murgatroyd, J. P. Carey, P. M. Pilarski, “Initial Investigation of a Self-Adjusting Wrist Control System to Maintain Prosthesis Terminal Device Orientation Relative to the Ground Reference Frame,” 7th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), August 26-29, Enschede, The Netherlands, 2018, pp. 756–763.(Preprint PDF)
- J.B. Travnik, K.W. Mathewson, R.S. Sutton, P.M. Pilarski, “Reactive Reinforcement Learning in Asynchronous Environments,” Front. Robot. AI 5:79, Jun. 2018. doi: 10.3389/frobt.2018.00079. (Published PDF)
- J.B. Travnik, P. M. Pilarski, “Representing High-Dimensional Data to Intelligent Prostheses and other Wearable Assistive Robots: A First Comparison of Tile Coding and Selective Kanerva Coding,” Proc. of the 15th IEEE-RAS-EMBS Int. Conference on Rehabilitation Robotics (ICORR 2017), July 17-20, 2017, QEII Centre, London, UK, pp. 1443–1450. (Preprint PDF)
- G. Vasan, P. M. Pilarski, “Learning from Demonstration: Teaching a Myoelectric Prosthesis with an Intact Limb via Reinforcement Learning,” Proc. of the 15th IEEE-RAS-EMBS Int. Conference on Rehabilitation Robotics (ICORR 2017), July 17-20, 2017, QEII Centre, London, UK, pp. 1457–1464. (Preprint PDF)
- A. L. Edwards, M. R. Dawson, J. S. Hebert, C. Sherstan, R. S. Sutton, K. M. Chan, P. M. Pilarski, “Application of Real-time Machine Learning to Myoelectric Prosthesis Control: A Case Series in Adaptive Switching,” Prosthetics & Orthotics International. vol. 40, no. 5, 573–581, 2016. doi: 10.1177/0309364615605373. (Published copy) (Preprint PDF)
- A. L. Edwards, J. S. Hebert, P. M. Pilarski, “Machine Learning and Unlearning to Autonomously Switch Between the Functions of a Myoelectric Arm,” accepted to the 6th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob2016), June 26-29, 2016, Singapore, pp. 514–521. (Preprint PDF)
- C. Sherstan, J. Modayil, P.M. Pilarski, “A Collaborative Approach to the Simultaneous Multi-joint Control of a Prosthetic Arm,” Proceedings of the 14th IEEE/RAS-EMBS International Conference on Rehabilitation Robotics (ICORR), August 11–14, Singapore, 2015, pp. 13–18. (PDF) (Video MPG, MP4)
Acknowledgements:
We would like to thank the Alberta Machine Intelligence Institute (Amii) and the University of Alberta for their continued support in this project.
